UW AIR Lab
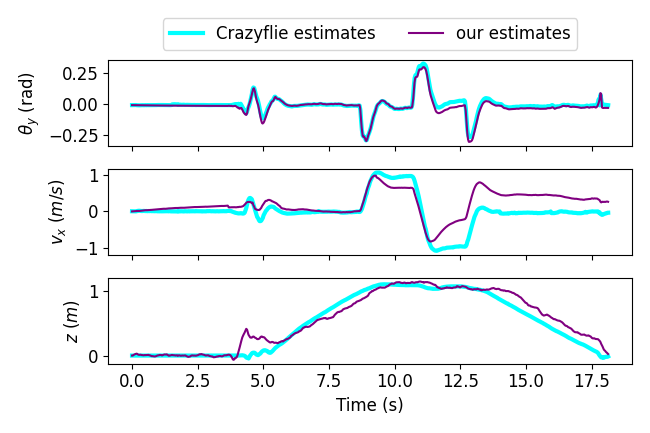
I work as an embedded systems engineer under the guidance of Professor Fuller. I came into this lab with no prior experience with C/C++ so I read and practiced the CSE 474 curriculum beforehand. My first project was to design a lightweight state estimation sensor suite along with a fellow lab member. For this project, I wrote a memory-efficient optical flow algorithm using the Lucas-Kanade method that I initially tested using a potentiometer and later compared with a Crazyflie quadcopter and mocap data. In our paper, I wrote a paragraph detailing how our optical flow algorithm reduced computation by approximate 39%. I also customized camera sensor drivers/registers to fit the needs of our project (adjusting frame rate, scaling image size). After we mounted the sensor suite (camera, IMU, and pressure sensor) onto the Crazyflie and collected data, we ran the raw data through a Kalman filter and I created graphs comparing the results from the sensor suite and the Crazyflie's onboard sensors (shown above). We presented our project at the 2024 Research Symposium and submitted our paper to the ICRA-IEEE 2025 conference. I have also previously worked on writing motor control code for a sub 3g quadcopter. I am currently working on developing a tracker for human movement. We have currently created a prototype that demonstrates the positional tracking (in a more convenient way than mocap) using a Matplotlib animation (linked below).